



POLVERE INTELLIGENTE (SMART DUST) COME SEMI DI TARASSACCO
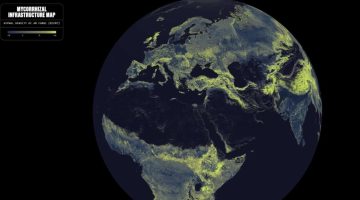
I-Seed è un progetto europeo che combina robotica bioispirata, materiali innovativi e soft e intelligenza artificiale per sviluppare semi robotici che possano essere utilizzati per il monitoraggio capillare dell’ambiente e di ogni cosa, compresi noi. Tra i semi selezionati dal progetto I-Seed figurano anche quelli del tarassaco, o “soffione”, dotati di una struttura che consente loro di permanere a lungo sospesi in aria in modo passivo, cioè senza l’impiego di energia. ITALIA 4.0 Semi robot biodegradabili dall’IIT per il monitoraggio ambientale
C’è da chiedersi se il frenetico viavai nei cieli non abbia già qualcosa a che fare con questa dimensione.
Sembra fin troppo evidente che non si tratta più di studiare la natura per comprenderla, per vivere meglio con essa, per stabilire un legame nuovo e consapevole e per superare la distruttiva mercificazione degli ultimi secoli che ha preso sempre più il sopravvento e ci sta portando sull’orlo del baratro. Non si tratta di effettuare studi per curare i danni subiti, che sono incommensurabili. Il desiderio di dominio totale detta il gioco.
Lo sviluppo cerca di superare la natura, attraverso una privilegiata artificialità che può essere controllata, manipolata e sfruttata. Si tratta di una grande illusione. Gli scienziati che lavorano a determinati progetti, come quelli presentati qui, possono essere guidati da obiettivi onorevoli. Tuttavia, se si guarda agli interessi dei promotori del progetto, si aprono mondi oscuri. Davanti a noi si apre lo scenario di un paesaggio senz’anima. Senza vita. A coronamento di tutto ciò, il sole verrà oscurato. Questo sta già iniziando ad accadere.
VEDI ANCHE: L’INGEGNERIZZAZIONE DELL’UMANITÀ E DEL PIANETA IN ESSERI ROBOTIZZATI E MEGAMACCHINA
Nogeoingegneria sul Canale Telegram https://t.me/NogeoingegneriaNews
***************
Piante “robotiche”: osservazioni di Barbara Mazzolai, Direttore del BSR Laboratory dell’IIT
Barbara Mazzolai è Direttore associato del Bioinspired Soft Robotics Laboratory dell’Istituto Italiano di Tecnologia. Insieme alla collega Cecilia Laschi ha avviato una nuova branca di studi, la robotica soft, da cui derivano le sue ricerche sui robot piante. Foto ©D. Farina/IIT. Foto in anteprima ©D. Farina/IIT.
Nell’intervista, Barbara Mazzolai, Biologa, Direttore associato del Bioinspired Soft Robotics Laboratory dell’Istituto Italiano di Tecnologia, ci spiega perché ha scelto il mondo vegetale, apparentemente statico, per sviluppare nuovi concetti di automi.
di Riccardo Oldani
Barbara Mazzolai, pioniera insieme con la collega Cecilia Laschi (ndr: la mamma di Octopus, il primo robot soffice: «Fare ricerca significa andare oltre i limiti») della robotica “soft”, da sempre si ispira per il suo lavoro di ricerca all’osservazione della natura. Biologa, direttore associato del Bioinspired Soft Robotics Laboratory dell’Istituto Italiano di Tecnologia, ha condotto negli ultimi anni tre grandi progetti europei per lo sviluppo di robot che imitano le piante: Plantoid, GrowBot e I-Seed. In questa intervista, ci spiega perché ha scelto il mondo vegetale, apparentemente statico, per sviluppare nuovi concetti di automi.
Quello che colpisce di Barbara Mazzolai, ogni volta che la si incontra, è l’energia apparentemente inesauribile e la quantità di progetti innovativi e di idee che riesce a produrre. Sono più di dieci anni che la conosco. Da quando il suo nome, insieme con quello della collega Cecilia Laschi, cominciò a essere associato a un nuovissimo filone della ricerca robotica, quello della “soft robotics”, orientata a produrre automi morbidi. Macchine cioè che non paiono fatte di metallo e plastica, ma di materiali cedevoli, che si adattano all’ambiente e lo esplorano proprio come fanno gli esseri viventi.
Era più o meno il 2010 quando le due ricercatrici, allora entrambe in forza al Laboratorio di Biorobotica della Scuola Superiore Sant’Anna di Pisa, divennero note nell’ambiente scientifico per il loro progetto Octopus, un polpo robotico che ha fatto scuola e che poi è stato di ispirazione a decine di progetti di ricerca in tutto il mondo.
Da allora Barbara Mazzolai ha fatto moltissima strada. Ora è a Genova, direttore associato del Bioinspired Soft Robotics Laboratory dell’Istituto Italiano di Tecnologia. Nell’ultimo decennio ha coordinato, tra gli altri, tre grandi progetti di ricerca europei tutti quanti ispirati al mondo delle piante: Plantoid, una struttura con radici robotiche che penetrano nel terreno; GrowBot, che utilizza appendici filamentose per crescere e inoltrarsi nell’ambiente come fanno le piante rampicanti; I-Seed, per lo sviluppo di semi artificiali capaci di disperdersi nell’ecosistema, monitorarlo e poi dissolversi senza lasciare traccia di sé.
Realizzazioni che estendono il concetto di robotica a forme e funzioni inaspettate, lontane dalle immagini stereotipate dell’umanoide o del braccio antropomorfo. Che cosa ha spinto Barbara Mazzolai a intraprendere questa strada, a lanciarsi in questa esplorazione di una terra incognita e, per certi versi, sconosciuta? Ho avuto occasione di parlarne con lei lo scorso ottobre, in una conferenza ospitata da un bellissimo appuntamento annuale di divulgazione, il Festival dell’Innovazione e della Scienza di Settimo Torinese. L’incontro si intitolava “Robot come piante” ed è possibile trovarne il video sulla pagina Facebook dell’iniziativa.
Il Plantoide, il robot progettato dal team di Barbara Mazzolai all’IIT che riproduce il comportamento delle radici delle piante quando penetrano nel terreno. Foto ©IIT.
Barbara, perché hai scelto il mondo delle piante per immaginarti nuovi robot?
È stata una scelta particolare e non è stata facile. Ma le motivazioni sono tante, a partire da quelle applicative. Io ho iniziato il mio percorso di ricerca con studi in biofisica, e in particolare sugli impatti di sostanze inquinanti sulla salute dell’uomo. È difficile in quell’ambito sviluppare sistemi per monitorare l’ambiente, soprattutto se si ricorre a tecnologie tradizionali. Ora però la robotica, insieme con l’intelligenza artificiale e la sensoristica stanno modificando il modo in cui queste misure possono essere fatte, portando in dote ai ricercatori sistemi che consentono controlli ripetuti nel tempo e su larga scala. Il loro sviluppo mi è sempre interessato. Già agli inizi del mio percorso di ricercatrice, insieme con i colleghi della Scuola Superiore Sant’Anna di Pisa, tempo fa, avevo sviluppato robot per il monitoraggio dell’aria e delle acque. Ora, una delle sfide ancora aperte in questo campo è il monitoraggio del suolo, che è senz’altro l’ambiente più complicato da esplorare, ancora più degli abissi a mio modo di vedere. Il suolo è estremamente eterogeneo. Anche soltanto scendendo a pochi centimetri di profondità, presenta sfide legate alla sua consistenza, alla sua granulosità, alle pressioni e agli attriti che vi si sviluppano.
Quindi poi è intervenuta la tua formazione di biologa, che ti ha spinta a cercare nella natura una soluzione a queste sfide poste dal terreno. È così?
Sì. La mia formazione di biologa mi ha portata a individuare quali organismi possano essere più adatti a realizzare un’efficace penetrazione nel terreno. Le piante, con le loro radici che creano reti in grado di raggiungere profondità importanti e di comunicare tra loro, sono senz’altro candidati ideali.
E qui emerge anche un’altra motivazione nello studiare il modello delle piante in funzione robotica. Indagare su questi organismi viventi ci aiuta a progettare robot con un’intelligenza e una capacità sensoriale distribuita, in grado di adattarsi perfettamente a ogni ambiente. Piattaforme robotiche ispirate al mondo vegetale ci consentono poi di accrescere le nostre conoscenze sulle piante stesse. In effetti, nel nostro percorso di sviluppo di robot di questo tipo, abbiamo avuto anche l’occasione di approfondire e validare nuove conoscenze sulle piante.
Il Plantoide aperto per mostrare la sua parte elettronica. Foto ©plantoidproject.eu.
Ritorna qui il ruolo della robotica non solo nel creare macchine ma anche nell’approfondire le conoscenze dei modelli a cui si ispira. Nel vostro caso la natura. I vostri studi hanno portato anche a nuove scoperte in biologia, è corretto?
Sì, la robotica biosipirata consente di creare questa sorta di fertilizzazione incrociata tra discipline ingegneristiche e scienze naturali. In un progetto di robotica soft di IIT, per esempio, abbiamo capito come funziona la ventosa delle braccia del polpo. Abbiamo scoperto strutture anatomiche che non erano state descritte in precedenza. Ci siamo concentrati sul corpo del polpo, sulla sensibilità distribuita e compreso meglio i meccanismi utilizzati da questo straordinario animale per controllare e muovere i suoi bracci. Anche per questo la robotica soft consente di aprire sempre nuovi filoni di ricerca.
Entriamo più nel dettaglio dei robot ispirati alle piante. A partire dal progetto che ha iniziato questo filone, il Plantoide.
Si è trattato di un lavoro molto complesso, in cui abbiamo dovuto confrontarci con un gran numero di difficoltà. Uno dei problemi principali è stato capire quali principi chiave dovevamo imitare. Nel caso della radice abbiamo dovuto realizzare setup sperimentali per comprendere in che modo la radice penetra nel suolo. Il primo passaggio è stato quindi l’osservazione, per esempio attraverso la creazione di terreni artificiali, costituiti da gel o da materiali granulari, che ci consentissero di vedere con i nostri occhi come la radice cresce e si insinua in profondità.
Una volta studiata la radice abbiamo dovuto poi capire come trasferire il modello naturale in un oggetto artificiale, che non è fatto di cellule, ma che comunque deve poter crescere come il suo modello naturale, cioè, come abbiamo potuto appurare, a livello della punta. È infatti nella porzione apicale della radice che si verificano una divisione di cellule e poi un allungamento, aiutato anche dall’assorbimento dell’acqua dal terreno. È questo meccanismo, qui descritto in modo molto semplificato, che consente alla radice di avanzare.
Per studiare l’accresciment1o delle radici nel terreno i ricercatori dell’IIT hanno dovuto ideare substrati trasparenti che consentissero la loro osservazione diretta – Foto
Perché è stato importante capire questo aspetto e dedicare tanto tempo al suo studio?
Perché nel terreno le pressioni sono elevate, già soltanto a una minima profondità. La radice non riuscirebbe ad avanzare se fosse spinta dall’alto, cioè dalla parte più vicina allo stelo o al tronco. Individuare questo meccanismo ha richiesto almeno un paio di anni di ricerca, passata attraverso la costruzione di diversi prototipi che funzionavano bene nell’aria ma non altrettanto nel suolo. Ma una volta che tutto ci si è chiarito, abbiamo potuto immaginare una radice robotica che cresce per aggiunta di materiale nella punta. E abbiamo potuto realizzarla miniaturizzando una stampante 3D, cioè uno strumento abitualmente utilizzato per realizzare strutture tridimensionali. Nel Plantoide la stampante lavora con un filo di materiale termoplastico, tenuto sempre a contatto della punta da un meccanismo a ruote dentate. Questo polimero quando viene scaldato modifica la sua viscosità, diventa fluido, si aggiunge al materiale già depositato in precedenza e consente così la crescita della radice robotica. Nella punta si trovano anche sensori, che indirizzano la direzione di crescita della radice robotica. Una radice naturale, per esempio, cresce verso l’acqua, oppure verso nutrienti come azoto e fosforo, o ancora è in grado di evitare ostacoli. Ebbene, siamo stati in grado di dare anche alla nostra radice robotica queste caratteristiche. Il robot può così decidere in autonomia se crescere verso l’acqua o verso un’altra sostanza di interesse.
Che cosa puoi dirci invece del progetto GrowBot, che è seguito in ordine cronologico al Plantoide?
Quello che fa la radice può succedere anche al contrario. Cioè anziché penetrare nel terreno si può crescere sfidando la gravità, in un ambiente fisico completamente diverso, l’aria. È ciò che fanno, per esempio, le piante rampicanti. GrowBot ha quindi sviluppato robot che le imitano. Le piante rampicanti, rispetto alle arboree o alle erbacee, utilizzano gran parte della loro energia per crescere verso la luce, instaurando una vera e propria competizione con altre specie simili. Molte rampicanti sono parassite e non sviluppano uno stelo robusto, perché sfruttano per sostenersi quello di un’altra pianta. Per farlo, però, devono sviluppare dei sistemi per aggrapparsi a dei sostegni. I rampicanti hanno messo a punto diverse strategie per riuscirci: per esempio il viticcio della vite oppure il sistema adesivo dell’edera o ancora uncini o peli utilizzati da altre specie. Noi stiamo studiando questi comportamenti per sviluppare robot capaci di crescere verso l’alto ma anche in ambienti difficili e accidentati, per esempio sotto le rovine di un crollo. Anche in questo caso il movimento è dettato da sensori che possono dare informazioni sull’ambiente circostante. Un altro aspetto importante è che tutti questi robot non devono usare tecnologie per la visione, riducendo quindi il loro consumo di energia.
Un viticcio artificiale sviluppato dal team di Barbara Mazzolai nell’ambito del progetto GrowBot. Foto ©IIT.
Adesso sei alla guida di un nuovo progetto, I-Seed, che prende spunto dai semi. Puoi raccontarci di che cosa si tratta?
Il progetto I-Seed prevede lo sviluppo di robot-semi, ispirati a quelli naturali, che non sfruttano per muoversi nell’ambiente una risorsa energetica interna, ma la variazione di parametri ambientali, come per esempio i cambiamenti di umidità o di temperatura legati all’alternanza tra giorno e notte. Si tratta di movimenti passivi, quindi, dettati dall’ambiente circostante. L’obiettivo di questi robot è fare monitoraggio ambientale dell’aria oppure degli strati superficiali del terreno, i primi due o tre centimetri del suolo. Per riuscirci ci stiamo ispirando a due diverse macrocategorie di semi. Per il suolo stiamo studiando semi capaci di penetrare nel terreno, come quelli di alcuni generi di Geraniaceae, per esempio Eriogonum o Pelargonium. Per la dispersione aerea abbiamo cercato modelli di riferimento che consentissero ai nostri robot di restare in aria il più a lungo possibile e li abbiamo trovati in due piante, in particolare, l’acero e il tarassaco, che tutti conosciamo come soffione. L’acero produce un frutto portatore di semi la samara, che quando cade dalla pianta innesca un’autorotazione che, unita a particolari caratteristiche di viscosità, la mantiene sospesa in aria a lungo. Il seme del soffione ha invece caratteristiche strutturali di leggerezza, unite a una serie di filamenti che costituiscono una sorta di paracadute capace di mantenerlo sospeso in aria.
Come sono poi “equipaggiati” questi semi robot?
All’interno delle loro strutture abbiamo integrato sensori basati su tecniche a fluorescenza che consentono la raccolta dei dati a distanza, utilizzando droni che sorvolano l’area e ne raccolgono i segnali luminosi, senza quindi costringere gli utilizzatori a recuperare uno per uno i robot dispersi. Che, tra l’altro, sono biodegradabili. Fin dall’inizio, infatti, abbiamo pensato allo sviluppo di oggetti dotati anch’essi di un loro ciclo vitale e, quindi, in grado di non provocare alcun tipo di impatto sull’ambiente. Ritengo che questo sia uno degli aspetti più innovativi del progetto. L’intelligenza del robot-seme risiede nella sua stessa struttura e nella scelta dei materiali.
Prove di laboratorio per testare le capacità di presa di un viticcio artificiale. Foto ©G. Berretta/IIT.
Dove possono rendersi utili questi robot ispirati alle piante?
Possono aiutare l’uomo a prendere decisioni corrette sulla gestione di un’area o di un territorio, che possono così basarsi su dati raccolti in modo capillare. Penso per esempio ai progetti di bonifica ma anche, più semplicemente, alla scelta di quale coltura mettere a dimora o di quali nuovi organismi introdurre in un ambiente. Tutte operazioni per cui è importante sapere nel dettaglio che cosa sta avvenendo nell’ecosistema. I nostri robot ispirati alle piante sono intrinsecamente sicuri, integrati nel ciclo di vita e non pongono alcun rischio alla salute dell’uomo e degli altri organismi viventi. Possono anche diventare strumenti di conoscenza per realizzare efficaci analisi ambientale e scoprire, per esempio, la presenza di contaminanti. Indagini di questo tipo sono ancora relativamente poche e sono oggettivamente difficili da condurre in modo capillare, a meno di intraprendere campagne molto costose. Strumenti come quelli che stiamo sviluppando noi, invece, possono consentire questo tipo di monitoraggio a basso costo. Questo vale a maggior ragione per il suolo, che è pochissimo conosciuto pur essendo caratterizzato da un’altissima biodiversità. L’equilibrio dell’ecosistema del suolo è legato a una quantità incredibile di relazioni e interscambi che è facilissimo alterare con interventi mal concepiti.
Pensate anche a impieghi in agricoltura?
Sia il plantoide sia tecnologie più semplici, come robot rampicanti, possono rivelarsi strumenti molto utili per l’agricoltura di precisione, per esempio per un dosaggio di acqua o di fertilizzanti effettuato in modo specifico pianta per pianta, sulle basi delle loro reali necessità. Un approccio del genere consente di pensare a un’agricoltura meno impattante sull’ambiente, in cui i trattamenti sono fatti con tale capillarità da evitare poi dispersioni in natura di sostanze che potrebbero invece avere effetti negativi, come penetrare nella falda acquifera oppure provocare “fioriture” algali indesiderate e alterare gli ecosistemi naturali.
Misurazioni su foglie realizzate nell’ambito del progetto GrowBot alla Scuola Superiore Sant’Anna di Pisa. L’istituto pisano ha fatto parte del consorzio che ha lavorato sul progetto coordinato da Barbara Mazzolai. Foto ©G. Berretta/IIT.
Parliamo comunque di progetti costosi. GrowBot da solo ha avuto uno stanziamento di più di 6 milioni di euro. Come si fa a trovare i finanziamenti? Come fate voi ricercatori a convincere gli investitori della bontà dei vostri progetti?
Trovare fondi è difficile. Tutti i progetti che stiamo conducendo sono prevalentemente europei e sono stati vagliati con un’attenta selezione e poi scelti da team di esperti tra tante altre proposte. Molte idee che proponiamo non hanno lo stesso successo. La concorrenza è altissima e i finanziamenti sono sempre pochi. Anche a livello europeo, tra l’altro, stanno cambiando molto le priorità e i criteri di scelta, sempre più indirizzati a progetti applicativi. Questo va a discapito della ricerca di base che è fondamentale, perché a volte è difficile prevedere quali saranno le applicazioni delle tecnologie che immaginiamo. La robotica soft ne è un tipico esempio. Non è propriamente ricerca di base ma le è molto vicina e porta allo sviluppo di macchine di cui spesso si scoprono possibili utilizzi solo dopo che le abbiamo concepite. Un caso tipico è il robot-polpo sviluppato. Con Cecilia Laschi, con cui lo abbiamo messo a punto, eravamo partite immaginando il monitoraggio dei mari. Ma poi in tutto il mondo vediamo lo sviluppo di robot ispirati al braccio del polpo per altri utilizzi, come per esempio applicazioni mediche. Noi stessi lo abbiamo impiegato per il recupero di oggetti in ambienti difficili. Insomma, è fondamentale finanziare progetti di ricerca guidati non soltanto dall’applicazione, ma anche dalla scienza. E questo diventa anche molto formativo per i giovani ricercatori, che vengono spinti così a pensare a cose completamente nuove, ad andare oltre i propri limiti e a essere più creativi. Anche solo la comprensione del mondo biologico, fondamentale nello sviluppo dei nostri robot, richiede un grande sforzo e umiltà mentale per rapportarsi sullo stesso piano con ricercatori di altri settori, come chimici o biologi. Abituarsi a questa apertura, in seguito, può trasformarsi in un bagaglio e in un metodo di lavoro di incredibile valore.
Nei progetti che coordini lavorano anche molti giovani ricercatori. Come riuscite a reclutare menti brillanti?
È un altro degli aspetti difficili del nostro lavoro. Per essere parte di progetti di ricerca di questo tipo occorre una condivisione di intenti e una predisposizione a collaborare con gli altri ricercatori che compongono i team. Attraverso una call, che è l’abituale sistema di reclutamento per i progetti internazionali che coordino, è difficile capire se un candidato abbia questa inclinazione. Nelle call si elencano le competenze richieste a livello tecnico o scientifico, ma non è possibile stabilire se esistano le basi anche di una condivisione degli ideali della ricerca. E non è sufficiente neanche un primo incontro, magari da remoto, per capire se ci sia questa predisposizione. Comporre team di ricerca che funzionano è quindi un lavoro complesso. Sul progetto I-Seed, comunque, siamo riusciti a creare una squadra molto affiatata e motivata, oltre che competente, e questo non è affatto scontato. A volte per un giovane ricercatore è anche difficile capire quali opportunità possano scaturire da un’esperienza del genere che consistono, a mio modo di vedere, nell’apprendere un metodo per tradurre idee e intuizioni in qualcosa di concreto. Insomma, ci vuole anche molta voglia di imparare. Questa è un’altra delle caratteristiche che cerco continuamente nei ricercatori che devono lavorare con me, con l’obiettivo di costruire insieme qualche cosa di importante e di condividere un percorso.
Semi naturali utilizzati come esempio da imitare nell’ambito del progetto I-Seed. Foto ©D. Farina/IIT.
FOCUS: CHI È BARBARA MAZZOLAI
Barbara Mazzolai è da circa un anno Direttore associato del Bioinspired Soft Robotics Laboratory dell’Istituto Italiano di Tecnologia. In precedenza ha diretto, dal 2011 al 2021, il Centro di Micro-biorobotica, sempre all’IIT.
Si è laureata in Biologia all’Università di Pisa nel 1995 e poi ha conseguito un master internazionale in Eco-Management nel 1998 alla Scuola Superiore Sant’Anna di Pisa. È anche PhD in Ingegneria dei Microsistemi, titolo conseguito nel 2011 all’Università di Roma Tor Vergata. Tra il 1999 e il 2009 è stata professore assistente di Ingegneria Biomedica alla Scuola Superiore Sant’Anna di Pisa nell’istituto che poi sarebbe diventato il BioRobotics Institute, una delle più prestigiose strutture italiane di robotica. Dal 2009 fa parte dell’Istituto Italiano di Tecnologia.
Oltre a tutto questo è anche membro del Scientific Advisory Board del Max Planck Institute per i Sistemi intelligenti.
Dei suoi progetti di ricerca abbiamo in parte parlato nell’intervista. Nel 2020 ha anche vinto un Consolidator Grant del Consiglio Europeo per la Ricerca con il progetto I-Wood, per una rete robotica per il monitoraggio delle foreste, che ha preso il via nel maggio 2021.
Durante la sua carriera ha contribuito come autore o co-autore a oltre 270 articoli scientifici e ha anche pubblicato due libri per Longanesi: “La Natura Geniale” (2019) e “Il futuro raccontato dalle piante”. ©TECNeLaB
FONTE https://www.tecnelab.it/approfondimenti/personaggi/piante-robotiche-osservazioni-di-barbara-mazzolai-direttore-del-bsr-laboratory-delliit
IMPORTANTE!: Il materiale presente in questo sito (ove non ci siano avvisi particolari) può essere copiato e redistribuito, purché venga citata la fonte. NoGeoingegneria non si assume alcuna responsabilità per gli articoli e il materiale ripubblicato.Questo blog non rappresenta una testata giornalistica in quanto viene aggiornato senza alcuna periodicità. Non può pertanto considerarsi un prodotto editoriale ai sensi della legge n. 62 del 7.03.2001.